- Share
- Share on Facebook
- Share on LinkedIn

Matériel
-
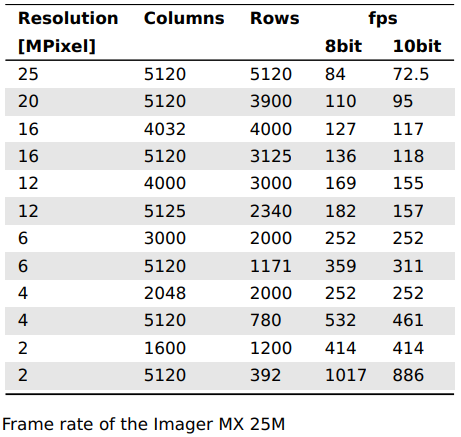
2 caméras MX25 :
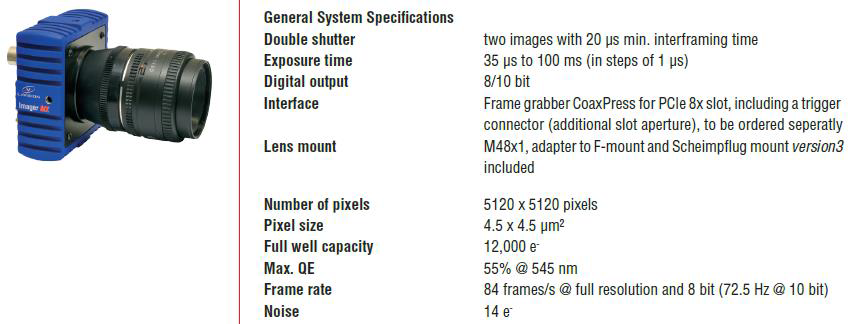
- matrice > 26 MP (5120 x 5120) en 8 ou 10 bits / taille de pixel de 4,5 μm × 4,5 μm ;
- fréquence d’acquisition variable 84 im/s en 8 bit et 72.5 im/s en 10 bit ;
- comptabilité mode PIV : double obturateur pour des temps interframe min de 20 μs ;
- modes trigger entrée/sortie multiples TTL
- monture de type F
- connectique de type CoaXPress oui avec des câbles de 10m.
- mode d’acquisition « fenêtré » pour augmenter la fréquence d’acquisition des images
-
2 caméras Pantom VEO440 L :

- matrice de 4 mégapixels (2560 x 1600) avec 12 bits pour les niveaux de gris ;
- fréquence d’acquisition variable à 1100 Im/s en pleine résolution (11900 im/s en 512 x 512) ;
- mémoire embarquée de 72 GB RAM permettant un enregistrement de 30 secondes à 400Hz en pleine résolution ;
- mode d’acquisition « fenêtré » paramétrable (ROI) permettant l’augmentation des fréquences d’acquisition et/ou la durée d’enregistrement ;
- modes trigger entrée/sortie multiples à connectique standardisée
- monture de type F
- connectique de type Ethernet 10Gb avec câbles de 5m.
-
jeu de 3 lentilles : 35mm, 50mm, 100mm
-
jeu de 5 mires pour des champs de vision allant du centimètre au décamètre
-
1 trépied par caméra
-
2 éclairages LED continu dimmable, angle ajustable de 20 à 60 ° environ (Fresnel), équivalent à 1400 W halogène ;
-
une station de travail :
Composée d’un PC, une unité de synchronisation, une carte d’acquisition pour signaux analogiques. Sur la machine sont installés le logiciel de pilotage et de traitement et tous les pilotes nécessaires au bon fonctionnement du système complet. A pleine résolution, pleine cadence, les caméras 25 MP pourront enregistrer les images pendant 1 minute. Pour garantie les meilleures performances du système, le PC est muni de 256 Go de RAM (pour la stabilité de l’acquisition) d’un système de disques en RAID0 pour écriture rapide environ 2 GB/s pour > 6.9 TB. L'unité de synchronisation « PTU » (Programmable Timing unit) permet d’envoyer des TTL pour synchroniser des éléments (laser pulsé rapide ou basse cadences, caméras…) ou de recevoir des TTL pour être synchronisé avec des machines tournantes, vibrantes, ou d’autres systèmes.
Calibration/Acquisition/Post-traitement
-
Le logiciel DaVis
- la calibration des caméras : correction optique et géométrie dans l’espace ;
- le pilotage de couples de caméras branchés sur d’autres stations ;
- le pilotage d’au moins 4 caméras ; en simultané
- le pilotage des caméras aux vitesses et fréquences susmentionnées - et ce pour le système haute résolution d’une part et le système haute cadence d’autre part.
- l’analyse par corrélation d’image numérique (CIN ou DIC en anglais) à partir des données de 2 caméras ou davantage (voir les exemples pour travailler sur les données de 4 caméras ou plus).
- l’extraction de données en format images fixes ou vidéo animées aux formats courants par exemple en 8 ou 16 bits : tiff ou jpg ou png et avi ou mp4 ….
- l’exportation des résultats de l’analyse par DIC sous format texte, csv, dat + lecture et écriture des fichiers en Python/Matlab
- il pilote une carte analogique qui permet d’enregistrer plusieurs signaux extérieurs et les synchronise avec les images.
- sortie +/- 10V d'une valeur d'extensomètre virtuel en temps réel (permettant le pilotage en temps réel d'essai à partir du traitement d'images)
-
Les logiciels constructeurs des caméras
Contact
Florent Vieux-Champagne
Soutiens financiers

![]()

- Share
- Share on Facebook
- Share on LinkedIn